Akustik Görüntüleme: Yanlış Pozitifler, Yapay Olgular ve Yansımalar
Akustik görüntüleme, endüstriyel denetimlerde; gaz kaçaklarının tespiti, kısmi deşarj analizi ve mekanik arıza teşhisi için paha biçilmez bir araç haline gelmiştir. Ancak, her ölçüm teknolojisinde olduğu gibi, verilerin doğru yorumlanması için kullanıcıların "yanlış pozitiflerin" (false positives) farkında olması gerekir. Bu makale, akustik kameralarda karşılaşılan yaygın yapay olguları (artifacts) ve yansımaları anlamanıza ve bunları gerçek ses kaynaklarından nasıl ayırt edeceğinize yardımcı olacaktır.
Yanlış Pozitif Nedir?
Akustik görüntülemede yanlış pozitif, kameranın ekranında bir ses kaynağı (sıcak nokta) varmış gibi görünen ancak gerçekte bir kaçak veya arıza bulunmayan durumdur. Bunlar genellikle ortamdaki seslerin yansımasından veya cihazın sinyal işleme sürecinden kaynaklanır.
Birbirleriyle ilişkili üç terim sıklıkla birbirinin yerine kullanılır, ancak farklı olguları tanımlarlar:
- Yanlış pozitif : Gösterilen konumda gerçek olmayan herhangi bir kaynak.
- Yapay hata : Işın demeti oluşturma algoritmasının kendisi tarafından üretilen sistematik bir hata modeli (örneğin, yan loblar).
- Hayalet görüntü : Yansıyan veya aynalanmış bir kaynak - dolaylı bir yoldan gelen gerçek ses.
Bu ayrımları anlamak önemlidir çünkü her türün farklı nedenleri, farklı ekran özellikleri ve farklı çözümleri vardır.
Sinyal Anomalilerinin Teknik Nedenleri ve Karakteristikleri
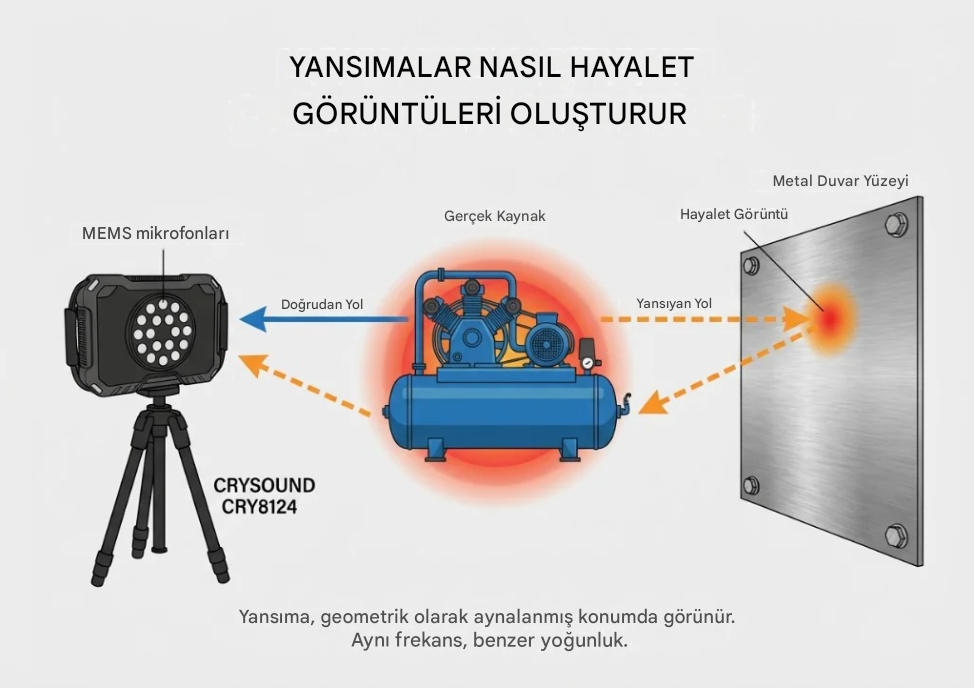
A. Akustik Yansımalar ve Speküler Geri Dönüşler
Ses dalgaları, yüksek yoğunluklu ve pürüzsüz yüzeylerde (paslanmaz çelik, beton, cam) optik bir ayna gibi davranır.
Mühendislik Gözlemi: Birincil kaynak ile yansıyan yüzey arasında geometrik bir simetri mevcuttur. Yansıyan sinyal, kaynak ile aynı frekans karakteristiğine sahiptir ancak genellikle genlik (desibel) değeri daha düşüktür.
B. Beamforming Yan Lobları (Side Lobes)
Mikrofon dizilimleri (array), ana sinyal lobunu (main lobe) işlerken matematiksel olarak kaçınılmaz olan ikincil enerji bölgeleri üretir.
Kritik Parametre: Mikrofon kanal sayısı arttıkça (örn. 128 veya 200 kanal), ana lob daralır ve yan lob enerji seviyesi bastırılır. CRYSOUND tarafından geliştirilen HyperVision gibi algoritmalar, bu yan lobları gerçek zamanlı olarak elimine ederek dinamik aralığı temizler.
C. Arka Plan Gürültüsü ve Geniş Bant Girişimi
Tesis içindeki fanlar, motorlar veya yüksek basınçlı prosesler, aranan sızıntı sinyalini maskeleyebilir.
Spektral Ayrım: Makine gürültüsü genellikle düşük frekanslı ve harmonik bir yapıdadır; sızıntı sesleri ise yüksek frekanslı (ultrasonik) ve türbülanslı (beyaz gürültü benzeri) karakterdedir.
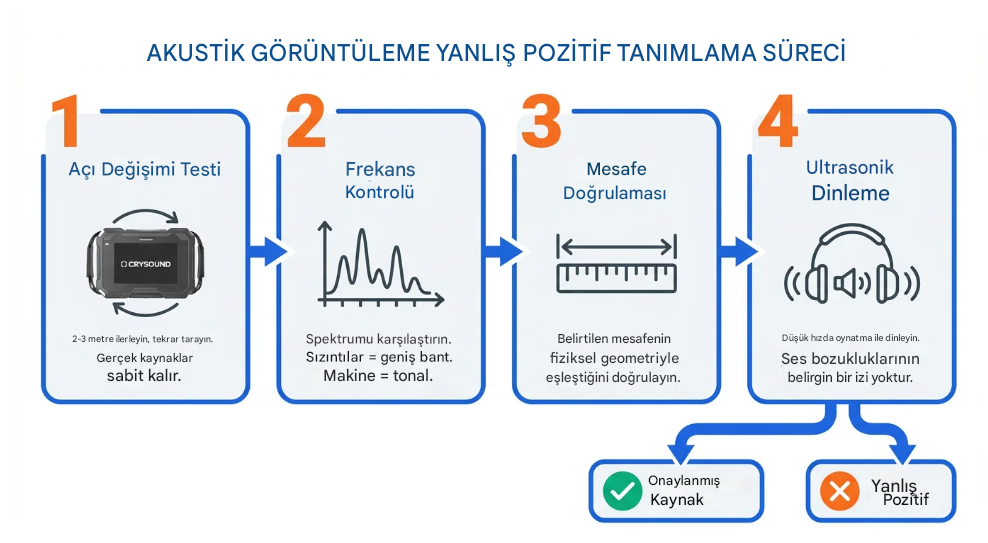
Emin olmadığınız bir gösterge gördüğünüzde, bunu doğrulanmış bir kaynak olarak kaydetmeden önce şu adımları izleyin:
1. Paralaks (Açı Değiştirme) Testi: Gözlem açısını 2-3 metre kaydırın. Fiziksel sızıntılar koordinatını korurken, yansımalar yüzey üzerinde hareket eder veya söner.
2. Spektral İmza Analizi: Sinyalin frekans spektrumunu inceleyin. 20 kHz üzerindeki türbülanslı geniş bant profili, sızıntı olasılığını güçlendirir.
3. Akustik Mesafe Korelasyonu: Cihazın hesapladığı akustik mesafe verisini, lazer mesafe ölçer veya görsel tahminle fiziksel geometriye göre doğrulayın.
4. İşitsel Heterodin Doğrulama: Cihazın "down-conversion" (frekans kaydırma) özelliğini kullanarak ultrasonik sinyali kulaklıkla dinleyin. Gerçek sızıntılar kendine özgü bir "tıslama" karakterine sahiptir.
Akustik Veri Analizinde İleri Seviye Strateji: Artefaktların Navigasyonel Kullanımı
Deneyimli bir akustik mühendisi için yanlış pozitifler, elenmesi gereken birer "gürültü" değil; akustik ortamın geometrisini ve gizli kaynakların konumunu deşifre eden stratejik veri noktalarıdır.
1. Yansıma Haritalama (Reflection Mapping) ve Akustik İz Sürme
Metal bir yüzeyde veya beton bir duvarda "hayalet görüntü" (ghost image) oluşması, aslında sistemin size sunduğu ikincil bir kanıttır. Ses dalgalarının izlediği yolu takip ederek, doğrudan görüş hattınızda (line-of-sight) olmayan kaynakları tespit edebilirsiniz.
Geometrik Tahmin: Akustik yansımalar, optik yansıma kanunlarına (gelme açısı = yansıma açısı) göre hareket eder. Bir yüzeyde hayalet görüntü gördüğünüzde, bu yüzeyi bir "akustik ayna" olarak kabul edip kaynağın fiziksel olarak nerede konumlandığını saniyeler içinde kestirebilirsiniz.
Kritik Avantaj: Özellikle karmaşık boru hatlarının arkasında, asma tavan panellerinin içinde veya makine muhafazalarının arkasında kalan gizli sızıntılarda; doğrudan sızıntıyı göremeseniz bile çevredeki yüzeylerdeki yansıma paternleri size sızıntının "akustik imzasını" taşır.
2. Profesyonel Teknik: Akustik Üçgenleme (Triangulation)
Dar ve çok sayıda yansıtıcı yüzeye sahip endüstriyel alanlarda, hayalet görüntülerin ekranda belirdiği noktaları not etmek bir zorunluluktur.
Uygulama: Birden fazla yansıma noktasının kesişim vektörlerini zihninizde veya cihaz üzerinde birleştirdiğinizde, kaynak ekipmanın arkasında kalsa dahi gerçek sızıntı noktasını üçgenleme yöntemiyle lokalize edebilirsiniz.
Mühendislik İpucu: Eğer sıcak nokta siz hareket ettikçe yüzey üzerinde yer değiştiriyorsa, o yüzeyden seken vektörü takip ederek ana kaynağa ulaşırsınız.

3. Yan Lob (Side Lobe) Desen Okuma ile Kaynak Doğrulama
Yan loblar, ışın demeti oluşturma (beamforming) algoritmasının ana lob etrafında oluşturduğu simetrik enerji halkalarıdır. Yeni başlayanlar bunu "birden fazla sızıntı" sanabilir, ancak uzman bir mühendis bu geometrik kusuru bir doğrulama aracı olarak kullanır.
Simetri Kontrolü: Eğer merkezi bir sıcak noktanın etrafında düzenli, dairesel veya radyal bir desen (hale) görüyorsanız, bu durum merkezdeki kaynağın çok güçlü ve gerçek olduğunun teyididir.
Engellerin Arkasını Görme: Görüşünüzün kısmen engellendiği durumlarda, yan lob halkasının sadece bir kısmını görmek, kaynağın engelin tam olarak hangi noktasının arkasında gizlendiğini anlamanızı sağlar.
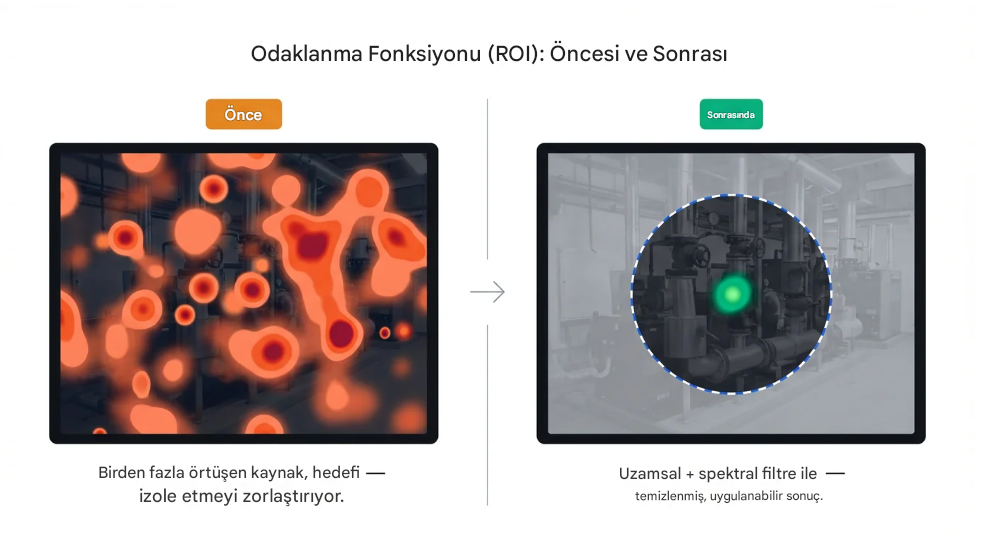
4. Mekansal Odaklama ve ROI (Odaklanma Fonksiyonu) Stratejisi
Gürültülü bir tesiste, çevredeki makineleri durdurmak her zaman mümkün değildir. Bu durumda mühendislik çözümü, "Uzamsal Filtreleme" kullanmaktır.
ROI İzolasyonu: Cihaz üzerindeki Odaklama Fonksiyonu (Region of Interest) ile sadece şüpheli bölgeyi analiz kapsamına alın. Bu, yazılımın hesaplama gücünü o bölgeye odaklayarak çevredeki makinelerden gelen ve yansımalara neden olan "akustik kirliliği" matematiksel olarak dışlamanızı sağlar.